****
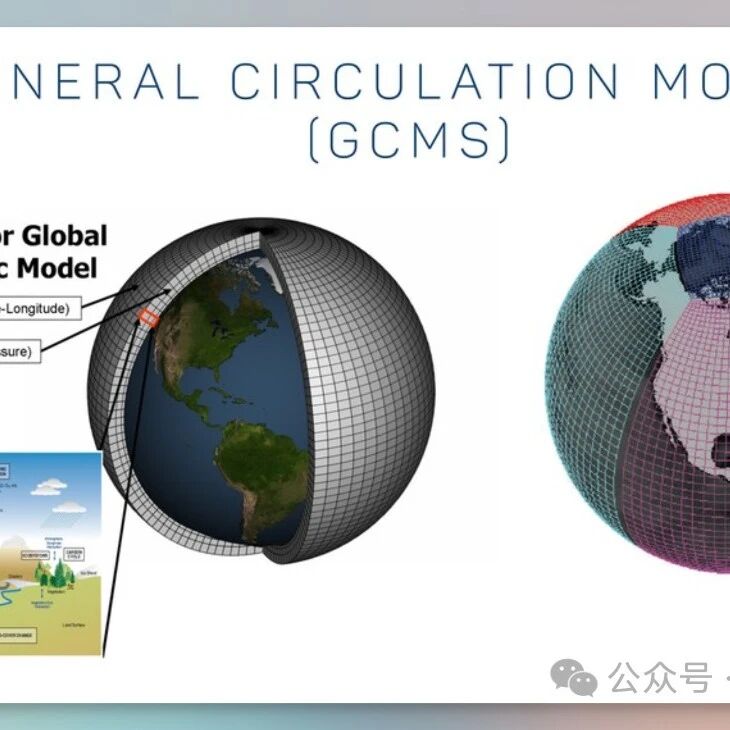
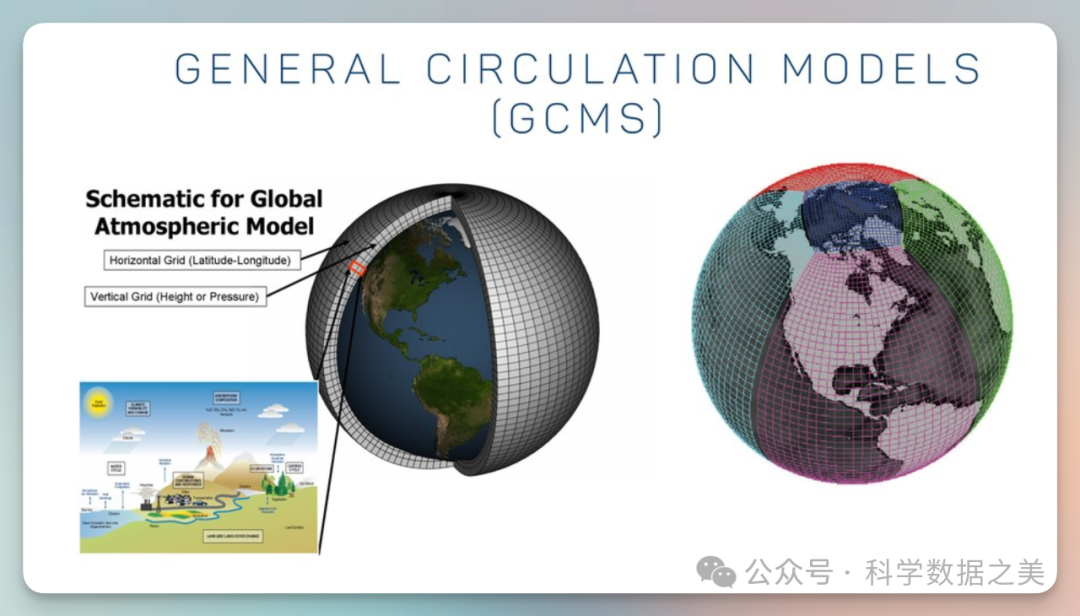
在海洋和大气科学研究领域,通用环流模式 (General Circulation Models, GCMs) 是研究地球系统的重要工具。这些数值模式产生的数据集规模庞大,且数据网格结构复杂多样。为了有效分析和比较不同数值模式的计算结果,我们需要一个不仅能处理不同模型的原生网格,还能避免插值操作带来的误差的软件工具。 xgcm就是这样一个Python包,它为GCMs及类似网格化数据集提供了强大的后处理分析能力。本文将介绍xgcm的设计理念、核心功能、应用案例以及未来开发计划。
设计目标
xgcm的诞生源于对 GCMs 数据分析的迫切需求。在诸如 CMIP6 (Coupled Model Intercomparison Project Phase 6) 这样的大型项目中,不同模式所提供的计算输出数据,无论是在水平方向还是垂直方向上,往往具有不同的网格结构。为了分析不同数值模式之间的计算结果差异,研究人员需要一个能够在模型原生网格上进行计算以及减小插值带来的误差的软件工具。
xgcm的设计目标是提供一个通用的数据处理分析工具,即使用户不了解底层网格的细节,也能像处理分析方程一样,轻松应用诸如梯度和散度等常见算子来进行数据处理。该工具能够自动识别速度变量所在的网格类型(例如 B 或 C 网格),并尽可能接近模型内部代码的方式执行数值计算。
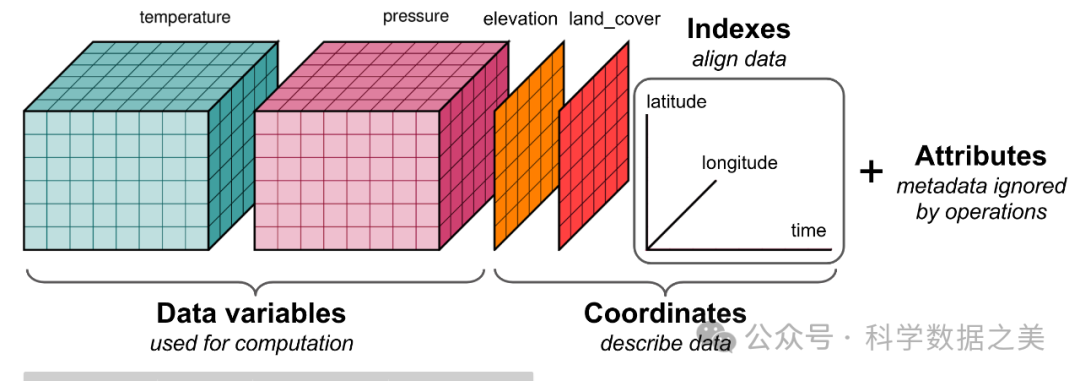
xgcm基于xarray数据结构,这是一种坐标和元数据丰富的多维数组数据表示,非常适合于GCMs数据的分析。xarray提供了便捷的数据索引和分组、支持坐标的数据转换,以及基于dask的并行、核外数组计算能力。在这些功能基础上,xgcm增加了对有限体积Arakawa网格的支持,并提供了适用于此类网格的微分和积分算子。
xgcm的另一个主要动机源于海洋、大气和气候模型分辨率的快速提升。虽然现代超级计算机可以轻松生成TB甚至PB级的数据集,但常用的后处理工作流程在处理这些海量数据时显得力不从心。因此,一个灵活的、开源的、基于Python的GCM分析框架势在必行,xgcm旨在提升该领域的整体生产力,并加速海洋与大气领域的科学发现。
核心功能
xgcm旨在提供一组核心的、通用的后处理功能,主要包括:
-
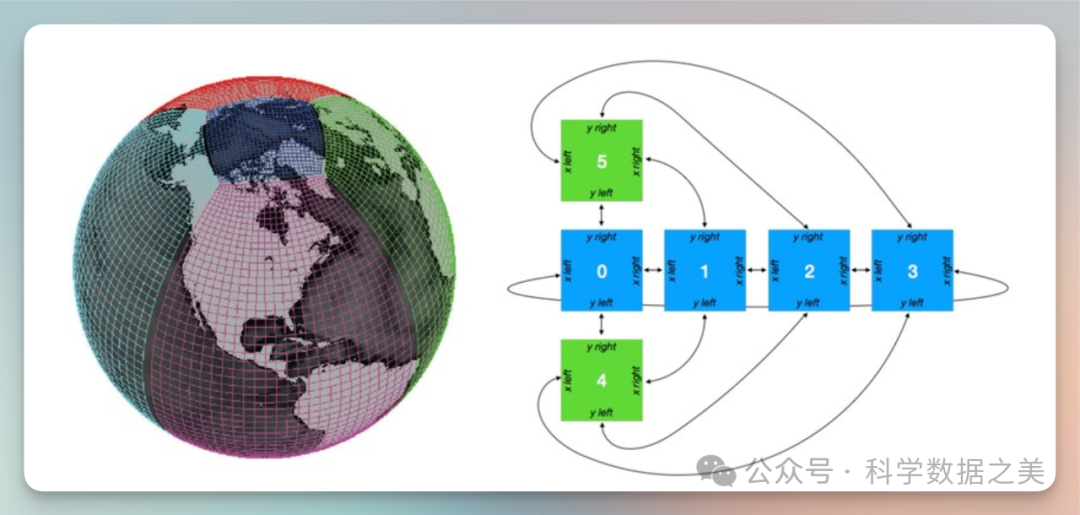
网格拓扑 (Grid Topology):xgcm能够处理常见的Arakawa网格类型(如 A、B、C 网格),并能自动识别变量所在的网格位置。这些网格通常用于海洋、大气模型中,其特点在于变量(如速度、压力、温度)在网格上的不同位置定义。理解网格拓扑是进行正确数值计算模拟的前提。
-
网格度量 (Grid Metrics):xgcm可以计算网格单元的距离、面积和体积等度量信息。这些度量信息对于正确计算诸如梯度、散度、通量等物理量至关重要。
-
网格通用函数 (Grid Ufuncs):xgcm提供了基于网格的通用函数,如差分和插值。这些函数能够自动处理不同网格类型的变量,从而简化了用户操作。xgcm 提供的 diff 和 interp 函数,用户无需考虑网格的细节,就可以实现变量在网格上的微分和插值运算。
-
边界条件 (Boundary Conditions):xgcm允许用户指定模型的边界条件,从而确保计算结果的准确性。
-
垂直坐标转换 (Transforming Vertical Coordinates):xgcm正在开发用于垂直网格转换的功能,例如将变量从几何坐标转换为密度坐标。
-
矢量微积分算子:xgcm计划实现常见的矢量微积分算子,如梯度 (grad)、散度 (div) 和旋度 (curl)。这些算子的实现将进一步提高xgcm的功能,使得用户可以更加轻松地进行矢量场的分析。
xgcm的核心理念在于保持功能的简洁性和通用性。该工具避免添加过于专业化的功能,如Okubo-Weiss参数或剪切和应变场,而是鼓励用户在其他软件包中基于xgcm构建这些功能。这种方法使得xgcm专注于提供基础、通用的网格处理工具,同时保证了其灵活性和可扩展性。
应用案例
1. MITgcm数值模式计算结果分析处理
1import xarray as xr
2import numpy as np
3import xgcm
4from matplotlib import pyplot as plt
5%matplotlib inline
6plt.rcParams[‘figure.figsize’] = (10,6)
7
8# download the data
9import urllib.request
10import shutil
11
12url = ‘https://zenodo.org/record/4421428/files/‘
13file_name = ‘mitgcm_example_dataset_v2.nc’
14with urllib.request.urlopen(url + file_name) as response, open(file_name, ‘wb’) as out_file:
15 shutil.copyfileobj(response, out_file)
16
17# open the data
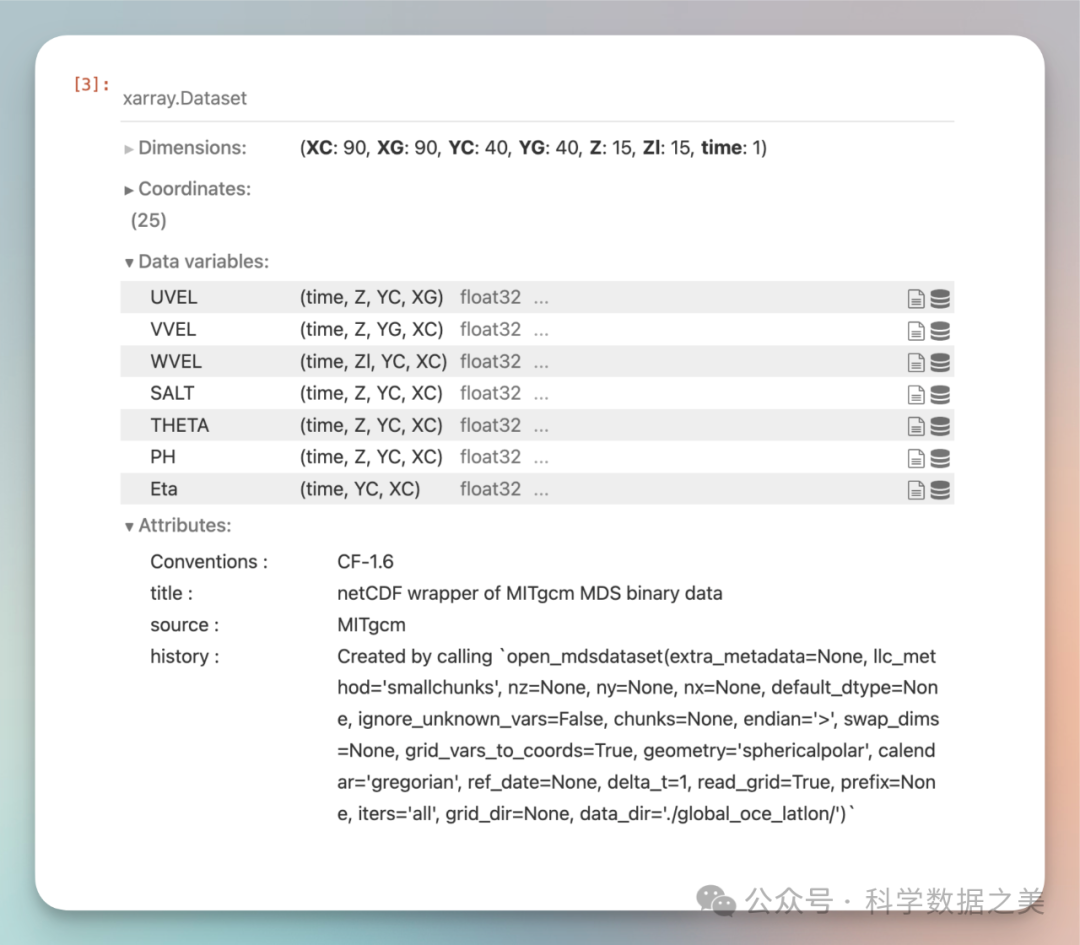
18ds = xr.open_dataset(file_name)
19ds
1u_transport = ds.UVEL * ds.dyG * ds.hFacW * ds.drF
2v_transport = ds.VVEL * ds.dxG * ds.hFacS * ds.drF
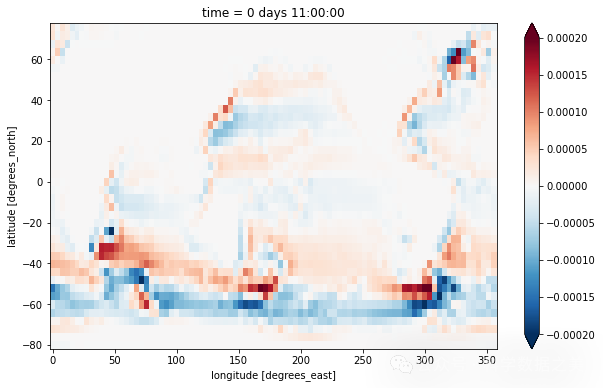
3div_uv = (grid.diff(u_transport, ‘X’) + grid.diff(v_transport, ‘Y’)) / ds.rA
4div_uv[0, 0].plot()
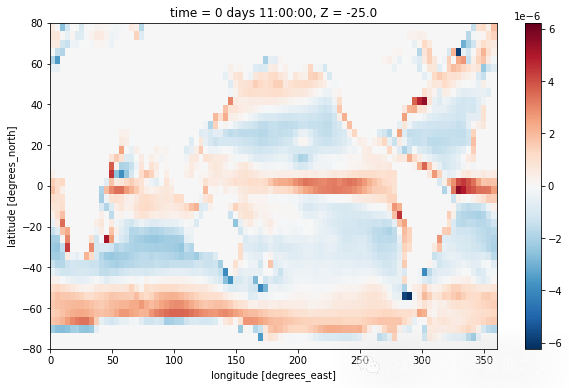
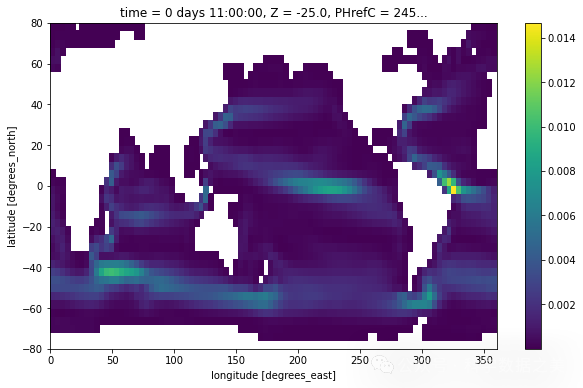
1zeta = (-grid.diff(ds.UVEL * ds.dxC, ‘Y’) + grid.diff(ds.VVEL * ds.dyC, ‘X’))/ds.rAz
2zeta_bt = (zeta * ds.drF).sum(dim=‘Z’)
3zeta_bt.plot(vmax=2e-4)
1ke = 0.5*(grid.interp((ds.UVELds.hFacW)**2, ‘X’) + grid.interp((ds.VVELds.hFacS)**2, ‘Y’))
2ke[0,0].where(ds.maskC[0]).plot()
2. MITgcm ECCOv4r3数据分析处理
1from matplotlib import pyplot as plt
2import cartopy as cart
3import pyresample
4
5class LLCMapper:
6
7 def init(self, ds, dx=0.25, dy=0.25):
8 # Extract LLC 2D coordinates
9 lons_1d = ds.XC.values.ravel()
10 lats_1d = ds.YC.values.ravel()
11
12 # Define original grid
13 self.orig_grid = pyresample.geometry.SwathDefinition(lons=lons_1d, lats=lats_1d)
14
15 # Longitudes latitudes to which we will we interpolate
16 lon_tmp = np.arange(-180, 180, dx) + dx/2
17 lat_tmp = np.arange(-90, 90, dy) + dy/2
18
19 # Define the lat lon points of the two parts.
20 self.new_grid_lon, self.new_grid_lat = np.meshgrid(lon_tmp, lat_tmp)
21 self.new_grid = pyresample.geometry.GridDefinition(lons=self.new_grid_lon,
22 lats=self.new_grid_lat)
23
24 def call(self, da, ax=None, projection=cart.crs.Robinson(), lon_0=-60, **plt_kwargs):
25
26 assert set(da.dims) == set([‘face’, ‘j’, ‘i’]), “da must have dimensions [‘face’, ‘j’, ‘i’]“
27
28 if ax is None:
29 fig, ax = plt.subplots(figsize=(12, 6), subplot_kw={‘projection’: projection})
30 else:
31 m = plt.axes(projection=projection)
32
33 field = pyresample.kd_tree.resample_nearest(self.orig_grid, da.values,
34 self.new_grid,
35 radius_of_influence=100000,
36 fill_value=None)
37
38 vmax = plt_kwargs.pop(‘vmax’, field.max())
39 vmin = plt_kwargs.pop(‘vmin’, field.min())
40
41
42 x,y = self.new_grid_lon, self.new_grid_lat
43
44 # Find index where data is splitted for mapping
45 split_lon_idx = round(x.shape[1]/(360/(lon_0 if lon_0>0 else lon_0+360)))
46
47
48 p = ax.pcolormesh(x[:,
49 vmax=vmax, vmin=vmin, transform=cart.crs.PlateCarree(), zorder=1, **plt_kwargs)
50 p = ax.pcolormesh(x[:,split_lon_idx:], y[:,split_lon_idx:], field[:,split_lon_idx:],
51 vmax=vmax, vmin=vmin, transform=cart.crs.PlateCarree(), zorder=2, **plt_kwargs)
52
53 ax.add_feature(cart.feature.LAND, facecolor=‘0.5’, zorder=3)
54 label = ”
55 if da.name is not None:
56 label = da.name
57 if ‘units’ in da.attrs:
58 label += ’ [%s]’ % da.attrs[‘units’]
59 cb = plt.colorbar(p, shrink=0.4, label=label)
60 return ax
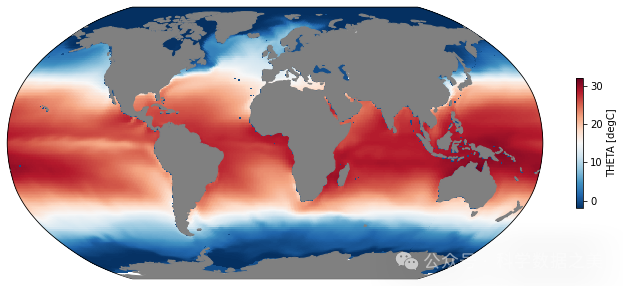
1sst = ds.THETA.sel(time=‘2000-01-15’, k=0)
2mapper(sst, cmap=‘RdBu_r’)
未来开发计划
xgcm的未来开发路线计划主要集中在以下几个方面:
- 矢量微积分算子: 实现梯度、散度、旋度等矢量微积分算子,并使其能像分析方程一样被轻松使用。
- 自动网格度量处理: 进一步完善自动网格度量处理,提高用户操作的便捷性,并避免因网格不匹配导致的计算错误。
- 垂直坐标转换: 实现通用的垂直坐标转换功能,从而使用户可以更灵活地处理和分析数据。
- 更好的文档和示例: 提供更详尽的文档和示例,从而帮助用户更好地理解和使用 xgcm。
- 与其他软件包的集成: 加强与其他 Python 科学计算软件包(如 scipy、numpy 等)的集成,从而进一步扩展 xgcm 的功能。
相关链接
本公众号相关内容推荐
- GeoAI:地理信息与人工智能的交叉融合
- 深度学习提升全球海洋涡旋动力学卫星观测能力
- 基于xarray扩展的开源地图可视化Python库
- NOAA 发布世界磁场模型 WMM2025
- 推荐10个用于处理GIS和遥感数据的Python库
- AI行业的2024年
- ECMWF的AI天气预报系统AIFS开放模型权重参数
- The Well:可用于机器学习研究的15TB 物理模拟数据集
- 推荐6个美化Matplotlib可视化样式的python库
- AI天气模型的现状与未来
- 流式传输和渲染可视化三维地理空间数据
- GIS领域常用的24种数据格式
- 一种基于图神经网络的三维建筑模型重建方法
- WebGIS技术栈推荐
- 使用Python工具可视化大型图网络
- 使用NetworkX提取图网络特征
- Argo海洋观测数据处理分析python库:ArgoPy
- 在Jupyter环境中创建交互式可视化地图
- 处理和可视化地理空间数据的Python库:EarthPy
- 地理空间深度学习python库:TorchGeo
- 遥感数据分析python库scikit-eo
- 图网络的应用场景及图分析python库
- 使用Python和NetworkX创建并可视化图网络(Graph Network)
- OpenResearcher:一个开源科学研究AI助理
- NeuralGCM: 一种融合机器学习与物理原理来模拟地球大气的新方法
- Transformer Explainer:文本生成模型交互式可视化工具
- 用于探索性数据分析(EDA)的开源python库
- 分享一个构建交互式D3js可视化的Python库
- 推荐15个图网络可视化python软件包
- 9个提升科研效率的软件工具
- 生成式人工智能模型颠覆传统天气预报
- 分享5个python可视化图表工具
- 分享17个网络(Network)数据可视化工具