
Ultralytics于2026年1月发布了YOLO26,这是YOLO系列首个原生端到端模型,完全移除了 NMS(非极大值抑制)后处理步骤。CPU推理速度最高提升43%,单次前向传递最多输出300个检测结果。一个延续了近十年的目标检测「补丁」,终于被从架构层面彻底删除了。
十年进化:从 YOLOv1 到 YOLO26
YOLO(You Only Look Once)是过去十年实时目标检测领域最具影响力的算法系列。2015 年,Joseph Redmon 等人提出了一个激进的想法:把目标检测从「先找候选区域再分类」的两阶段流水线,压缩成一次前向传递完成全部工作。 这个想法彻底改变了目标检测的速度上限。
奠基期(2015-2018):从概念到可用
| 版本 | 年份 | 作者 | 核心突破 |
|---|---|---|---|
| YOLOv1 | 2015 | Joseph Redmon | 首创单阶段检测——将图像分成 7×7 网格,每个网格直接预测边界框和类别概率 |
| YOLOv2 | 2016 | Joseph Redmon | 引入 Darknet-19 骨干网络、锚框(Anchor Box)机制和批归一化,大幅提升精度 |
| YOLOv3 | 2018 | Joseph Redmon | 升级 Darknet-53 骨干,引入多尺度检测(三个不同分辨率的特征图),首次在小目标上表现良好 |
YOLOv3 是一个里程碑,它在COCO数据集上达到了当时的实时检测最佳水平,且Redmon的开源策略让YOLO迅速成为工业界的标准选择。2020年,Redmon因伦理顾虑退出计算机视觉研究,但 YOLO的开源生态已经不可逆转。
社区接力期(2020-2022):百花齐放
Redmon 退出后,YOLO 进入了多团队并行发展的阶段:
| 版本 | 年份 | 团队 | 核心突破 |
|---|---|---|---|
| YOLOv4 | 2020 | Alexey Bochkovskiy | CSPDarknet-53 骨干 + PANet 颈部网络 + Mosaic 数据增强 + 大量训练技巧(BoF/BoS) |
| YOLOv5 | 2020 | Ultralytics | PyTorch 原生实现——告别 Darknet C 框架,引入自动锚框计算和模型缩放(n/s/m/l/x 五档) |
| YOLOv6 | 2022 | 美团 | 针对工业部署优化,RepVGG 重参数化骨干,硬件友好设计 |
| YOLOv7 | 2022 | Chien-Yao Wang | E-ELAN 高效聚合网络 + 模型重参数化 + 辅助头训练策略 |
这个阶段的关键转折是 YOLOv5。它不是论文驱动的学术模型,而是工程驱动的开源项目。Ultralytics用PyTorch重写了整个框架,降低了使用门槛,让YOLO从研究工具变成了真正的生产工具。至今 YOLOv5仍是很多工业项目的首选。
Tip
版本号争议YOLO 的版本编号并非由单一组织控制。YOLOv5没有正式论文,YOLOv6是美团的独立工作,不同版本之间并不是严格的「上一代改进」关系,更像是多个团队在同一框架下的并行演进。
统一与突破期(2023-2026):走向端到端
| 版本 | 年份 | 团队 | 核心突破 |
|---|---|---|---|
| YOLOv8 | 2023 | Ultralytics | 无锚框检测(Anchor-free)+ 解耦头(分类和回归分开)+ 统一多任务框架 |
| YOLOv9 | 2024 | Chien-Yao Wang | PGI(可编程梯度信息)+ GELAN 通用高效聚合网络,解决深度网络信息丢失问题 |
| YOLOv10 | 2024 | 清华大学 | 首次探索无 NMS 训练引入一致双分配策略,但仍保留 NMS 作为可选项 |
| YOLO11 | 2024 | Ultralytics | C3k2 模块 + C2PSA 注意力机制,参数比 YOLOv8 少 22% 但精度更高 |
| YOLO26 | 2026 | Ultralytics | 完全移除 NMS原生端到端推理,MuSGD 优化器,STAL 小目标策略 |
这个阶段有两条主线并行。
1. Ultralytics 的统一路线:YOLOv8 → YOLO11 → YOLO26,逐步构建统一的多任务框架(检测、分割、分类、姿态估计、旋转框),同时不断简化部署流程。
2. 学术界的端到端探索:YOLOv10率先尝试了无NMS训练,证明了可行性。YOLO26在此基础上彻底完成了端到端化,不是「可以不用 NMS」,而是「架构上根本不需要 NMS」。
每一次关键跃迁都在做同一件事:**减少人工设计的规则,让模型自己学更多。**从手动设计锚框到自动锚框,从锚框到无锚框,从NMS后处理到完全端到端。YOLO26 是这条路径的自然终点。
NMS 是什么,为什么它是个问题
要理解YOLO26的突破,先要理解它解决了什么问题。
所有传统 YOLO 模型(从 YOLOv1 到 YOLO11)都面临一个相同的问题:模型会为同一个物体生成多个重叠的检测框。NMS 就是用来去除这些重复框的后处理算法——保留置信度最高的那个,抑制其他的。
听起来很合理,但 NMS 带来了三个严重问题:
| 问题 | 影响 |
|---|---|
| 速度瓶颈 | NMS 是串行操作,无法被 GPU 有效加速,成为推理管线的瓶颈 |
| 部署复杂 | NMS 需要额外的算子支持,不同硬件平台(TensorRT、CoreML、TFLite)实现不一致 |
| 行为不确定 | NMS 的 IoU 阈值是超参数,不同场景需要手动调整,密集场景下容易误删正确检测 |
换句话说,NMS 不是模型学到的东西,而是人类强加的规则补丁。YOLO26 的核心突破就是:让模型自己学会只输出一个框,而不是先输出一堆框再靠规则去重。
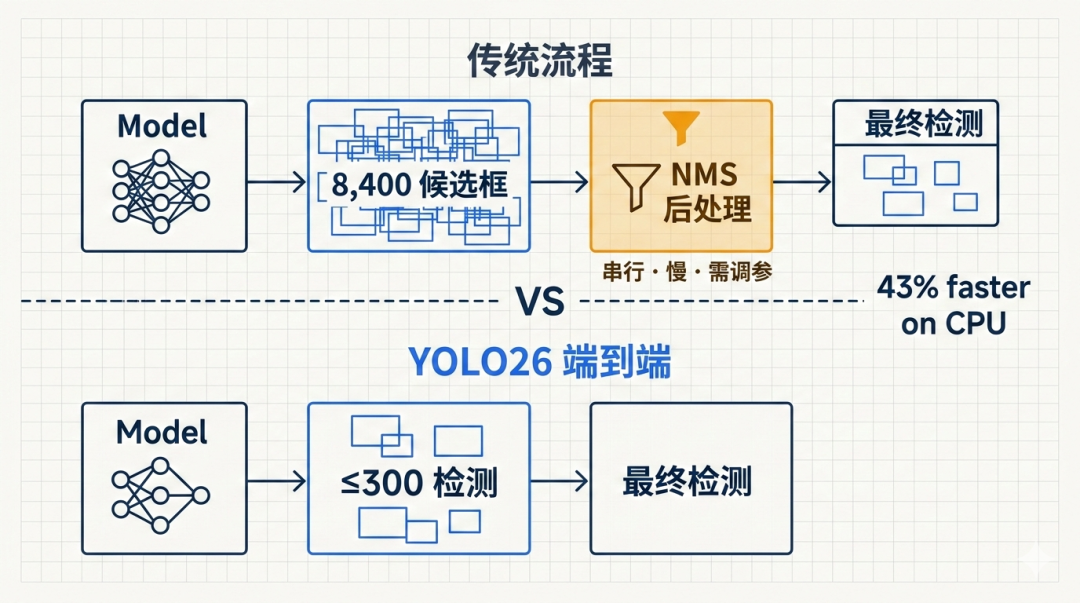
传统 YOLO vs YOLO26 检测流程
YOLO26 如何做到无 NMS
YOLO26 采用了双头(Dual-Head)架构,引入三项关键创新:
1. One-to-One Head:一个物体一个框
默认使用 One-to-One 检测头,每个物体只产生一个预测框,输出维度为 (N, 300, 6)。最多 300 个检测,每个检测包含坐标和置信度。
对比传统方式:
| 架构 | 输出 | 后处理 |
|---|---|---|
| YOLO11 | 8,400 个候选框 | 需要 NMS 去重 |
| YOLO26 (One-to-One) | 最多 300 个检测 | 无需任何后处理 |
训练时仍然使用 One-to-Many 头来保证学习信号充足,推理时只用 One-to-One 头。这意味着:训练和部署使用的模型完全一致。
2. MuSGD 优化器:借鉴 LLM 训练技术
将 SGD 与 Muon 优化算法结合,借鉴了大语言模型训练中的优化技术。这对于稳定小型骨干网络的训练尤为关键——小模型在去掉 NMS 后更容易训练不稳定,MuSGD 解决了这个问题。
3. STAL + ProgLoss:针对小目标和动态监督
- • STAL(Small-Target-Aware Label Assignment):改进了小目标的标签分配策略
- • ProgLoss(Progressive Loss):动态调整监督信号强度
这两项技术确保在移除 NMS 的同时,不牺牲密集小目标场景的检测精度。
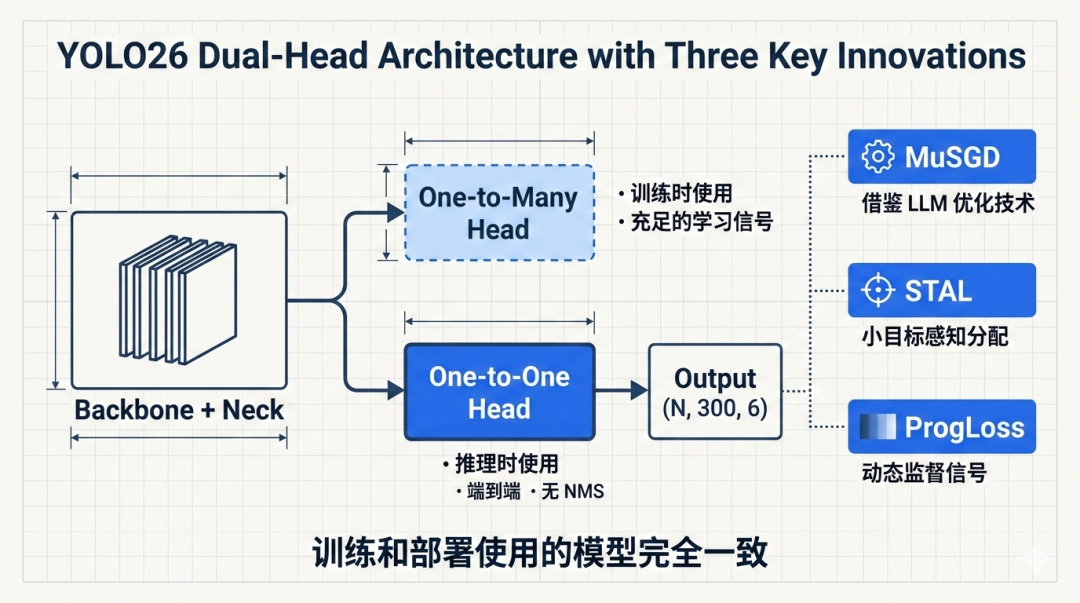
YOLO26 双头架构
性能数据:不只是更快
YOLO26 在 COCO 数据集上的表现:
| 模型 | 参数量 | mAP₅₀₋₉₅ | CPU 延迟 | 适用场景 |
|---|---|---|---|---|
| YOLO26n | 2.4M | 40.9 | 38.9ms | 嵌入式/手机 |
| YOLO26s | 9.2M | 48.3 | 79.4ms | 边缘设备 |
| YOLO26m | 18.2M | 53.1 | 220ms | 平衡精度与速度 |
| YOLO26l | 26.8M | 54.9 | 328ms | 高精度需求 |
| YOLO26x | 55.7M | 57.5 | 525.8ms | 最高精度 |
关键对比:
- • YOLO26n vs YOLO11n:CPU 推理速度提升 43%,同时精度更高
- • 建立新的帕累托前沿:在推理速度和检测精度两个维度上,同时超越 RTMDet、DAMO-YOLO 等竞品
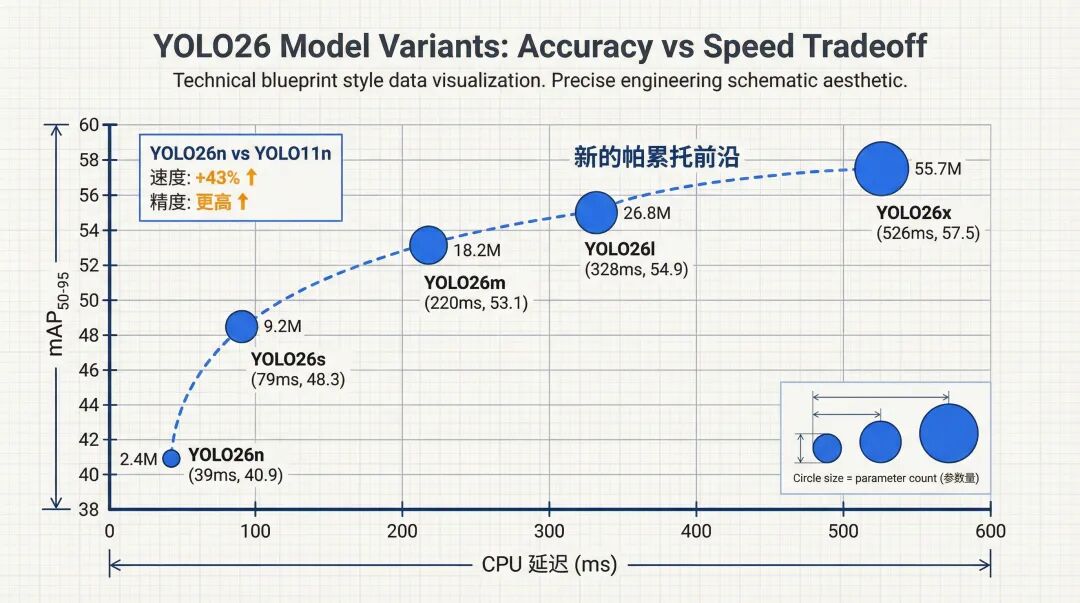
YOLO26 性能帕累托前沿
支持的任务远不止检测
YOLO26 不只是一个检测模型,而是一个多任务统一框架:
| 任务 | 说明 |
|---|---|
| 目标检测 | 核心能力,NMS-free 端到端推理 |
| 实例分割 | 像素级物体分割 |
| 图像分类 | ImageNet 预训练分类器 |
| 姿态估计 | 人体关键点检测,使用残差对数似然估计(RLLE) |
| 旋转目标检测(OBB) | 适用于遥感、文档等需要旋转框的场景 |
此外,YOLOE-26 扩展支持开放词汇实例分割——通过文本或视觉 Prompt 检测任意类别的物体。
对部署的实际影响
移除 NMS 不只是速度提升,它从根本上简化了部署管线:
之前的部署流程:
模型导出 → ONNX → 平台特定 NMS 算子 → 调参 → 部署YOLO26 的部署流程:
模型导出 → ONNX/TensorRT/CoreML/TFLite → 部署- • 不再需要平台特定的 NMS 实现
- • 导出即部署,训练模型和推理模型完全一致
- • **适配更多边缘设备:**很多低端硬件不支持 NMS 算子,现在不需要了
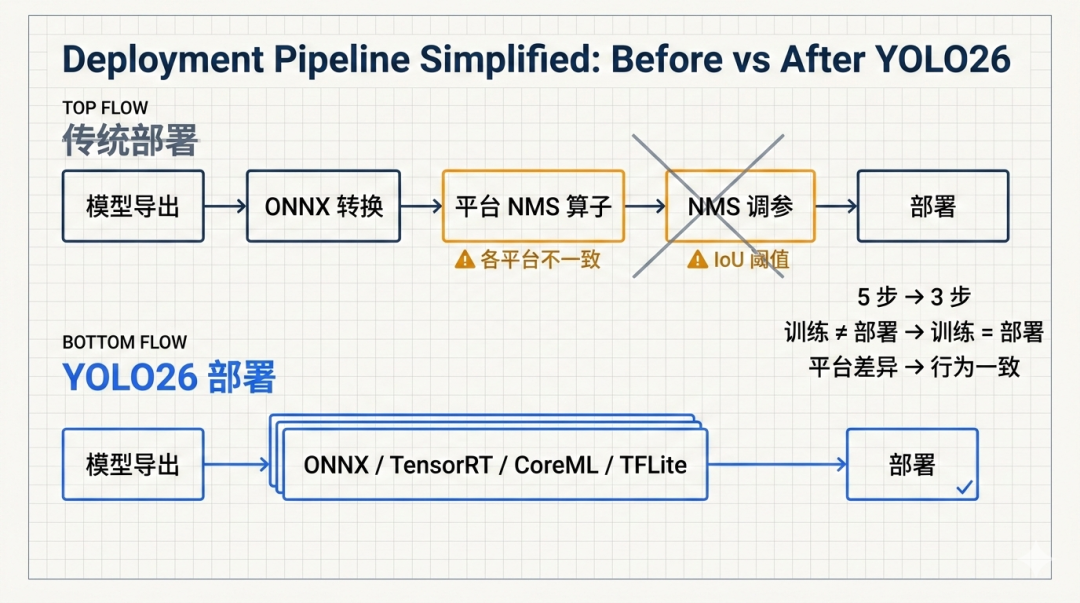
部署流程简化
快速上手
pip install ultralytics
# 推理yolo detect predict model=yolo26n.pt source="image.jpg"
# 训练yolo detect train model=yolo26n.pt data=coco.yaml epochs=100
# 导出yolo export model=yolo26n.pt format=onnx模型权重在首次使用时自动下载。支持 Python API 和 CLI 两种使用方式。
Tip
从旧版本迁移如果你之前使用 YOLO11,迁移几乎零成本——API 完全兼容,只需替换模型名称。但注意:YOLO26 默认使用 One-to-One 头,如果你的场景需要密集候选框(如级联检测),可以手动切换到 One-to-Many 头。
为什么这件事很重要
NMS是目标检测领域延续了近十年的「必要之恶」。它不是模型的一部分,而是对模型缺陷的补偿。每一代YOLO都试图减少对NMS的依赖,但直到YOLO26才真正从架构层面消除了它。
这个突破的意义不仅在于速度和精度:
- 1. 端到端可微分:整个检测管线可以作为更大系统的一部分进行端到端训练
- 2. 部署简易:更多低端硬件可以直接运行,不需要复杂的后处理支持
- 3. 行为确定性:同一模型在所有平台上的行为完全一致,不再有 NMS 阈值带来的不确定性
实时目标检测,正式进入端到端时代。